
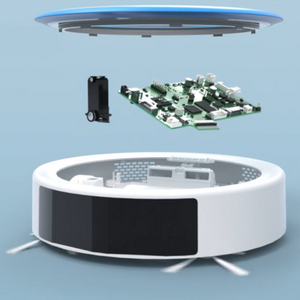
Robart robot
Cleaning robot with AI navigation system, which consists of hardware (sensor, mainboard) and software, as well as accompanying IoT services, which enable communication with the device.
I designed large part of the main board HW, the HW and FW of the battery management unit, one version of the safety circuit, and experimented with various sensors.


